导言:这篇文章两篇论文,关于blind去噪相关。
When AWGN-based Denoiser Meets Real Noises
What is the problem:
- 实际噪声是空域相关的,但是生成的AWGN是空域无关的。使用在AWGN中训练的网络在无法在实际noise中获得较好得结果。
The synthetic noises adopted in most previous work are pixel-independent, but real noises are mostly spatially/channel-correlated and spatially/channel-variant. This domain gap yields unsatisfied performance on images with real noises if the model is only trained with AWGN
- 如何解决生成噪声的空域无关?或如何解决实际噪声中的空域耦合性?
main idea:
- 方法pipeline:
- train 模型依然是在AWGN的图像中train
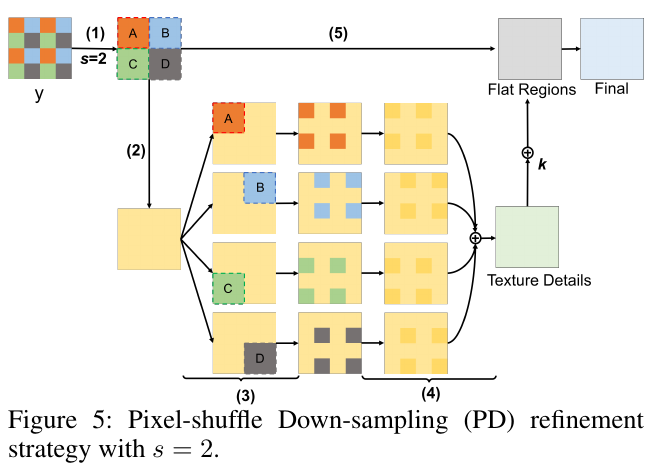
- 在对实际img进行去噪时,去掉实际图片中噪声的空间依赖性,speciffically 使用Pixel shuffle,将有噪声的real img重排。
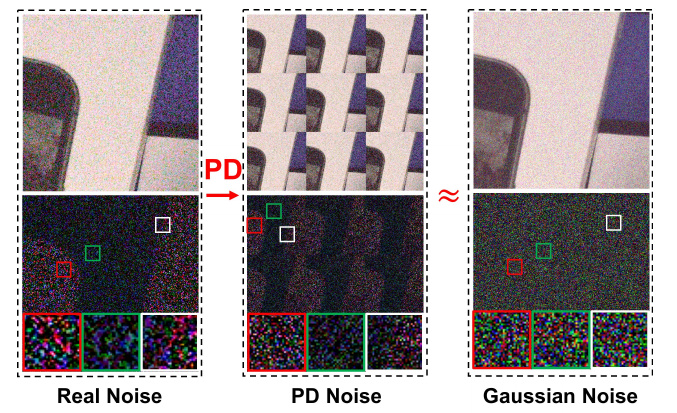
- 对于重排的图片使用trained的高斯去噪模型去去噪,然后重排列回来。
- pixel shuffle 方法:每隔stride抽样,得到重排的图像,在保持pixel的值不变的条件下,改变每一个pixel的空间性。
启发:
- 这类可以看作real noise的magnetite和position(空域)的disentangelment 问题。
- 自监督,对比学习的方法可以在此应用,具体的,将AWGN看作对于noise magnititude的减少,我们把noise图像按照某种方式投影到某个高纬度空间,将其位置信息接耦合掉,使得其位置分布符合一般高斯噪声分布,在高维空间中对高斯噪声进行去噪,依次添加位置信息重构原图。(区别与该paper,不一定是bi抽样,位置可能不是相邻或一般规律。)
Toward Convolutional Blind Denoising of Real Photographs
What is the problem:
- 当model train 在AWGN上时易发生过拟合,范化性差,于是提出一个
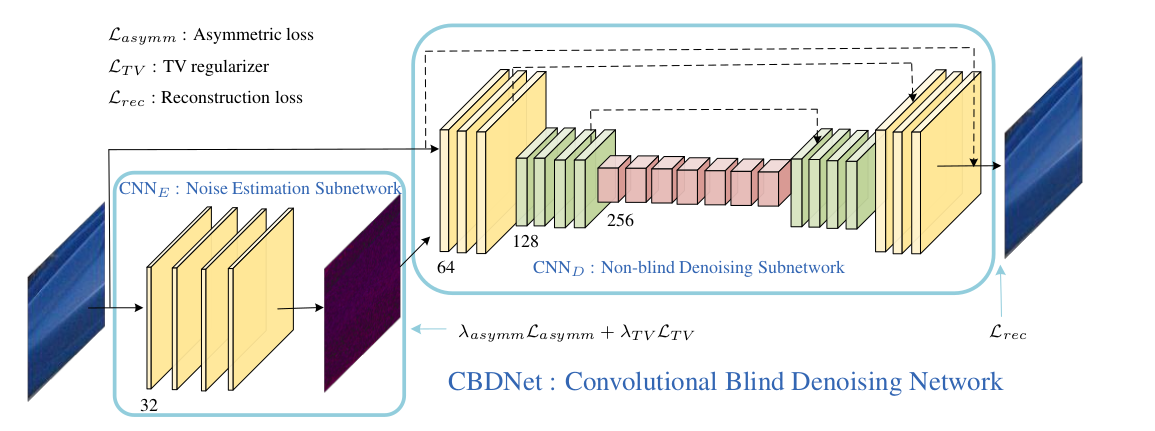
convolutional blind denoising networkThe learned models are easy to overfit on the simplified AWGN model which deviates severely from the complicated real-world noise model
Main idea:
- Pipeline: 先预测噪声图的噪声等级,再将该预测和噪声图放入Non-blind Denoising SUbnetwork.(针对该噪声等级的network)。
- 如何做到Blind?
- 预测不同的噪声等级,模型输入会进入更多信息,并自适应地去对不同噪声进行针对性处理。
- 如何学噪声等级?
- 将cln和噪声图片同时输入进噪声估计网络 $\sigma(\cdot)$ 得到两者的噪声等级, $\sigma(\tilde{y})$ 应该是要小于 $\sigma(y)$ 的。所以在 $\sigma(\tilde{y}) < \sigma(y)$ 处应该是存在loss error的。

- 同时,clean img的噪声估计结果应该在x,y方向平滑,以梯度约束。

- 将cln和噪声图片同时输入进噪声估计网络 $\sigma(\cdot)$ 得到两者的噪声等级, $\sigma(\tilde{y})$ 应该是要小于 $\sigma(y)$ 的。所以在 $\sigma(\tilde{y}) < \sigma(y)$ 处应该是存在loss error的。
实验:
训练集:
生成的数据,RGB to synthesis the raw image. revers ISP. 在raw中加入噪声用ISP转到RGB得到噪声图像。
- synthesis data: use 400 images from BSD500 [40], 1600 images from Waterloo [36], and 1600 images from MIT-Adobe FiveK dataset [7] as the training data.
- real noise data: As for real noisy images, we utilize the 120 images from the RENOIR dataset [4]
启发:
- 对于Non-blind 噪声自适应并没有很好利用。等级需要逐层影响网络模块是否会有更好效果。
- 做成unpair的?
- 跨域的unpair
- 同域的unpair
- $\sigma(\tilde{y})$ 应该是要小于 $\sigma(y)$ 的。所以在 $\sigma(\tilde{y}) < \sigma(y)$ , 噪声图的噪声估计结果只可能大于等于cln。
- 可否用oneshot来做