导言:这篇文章两篇论文,Self Supervised去噪相关。
Neighbor2Neighbor: Self-Supervised Denoising from Single Noisy Images
时间线:
- Noise2Noise
- Probabilistic Noise2Void
- Noise2Void_ICCV2019
- Noise2Self_ICML2019
- Self-Guided_ICCV2019
- Noisier2Noise_CVPR2020
- Self2Self_CVPR2020
What is the problem
- 噪声对不好获取
- self的方法没有很好利用独立噪声的信息。
The requirement of large amounts of noisy-clean image pairs for supervision limits the wide use of these models
Existing self-supervised denoising approaches suffer from inefficient network training, loss of useful information, or dependence on noise modeling. - 不同与Noise2Noise,this paper 假设两张noise 图片的期望并不相同。

The ground-truths of two noisy observations are difficult to be the same due to occlusion, motion, and lighting variation
Method
- pipeline
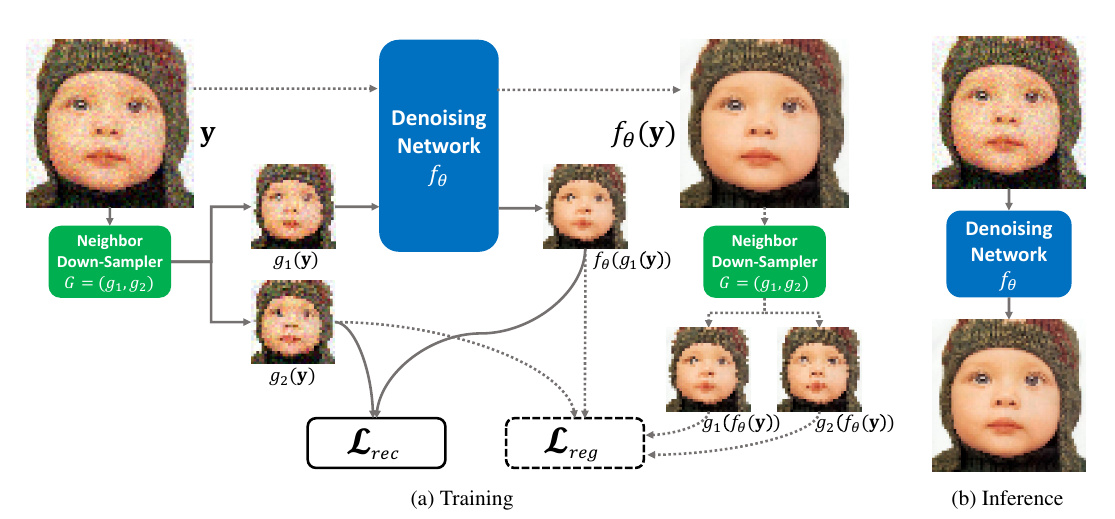
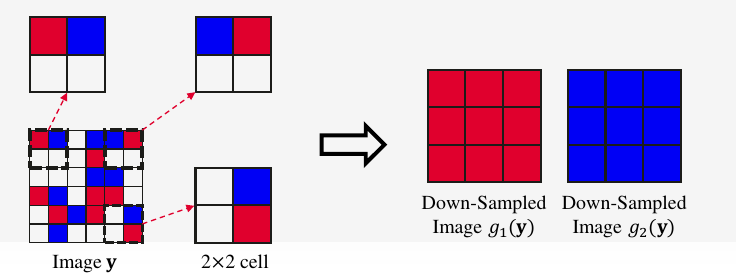
- 抽样方法:随机抽cell中的邻近对(4选2),一个抽为 $g_1(y)$ 一个抽为 $g_2(y)$ (2选1)。
- loss

Noise2Noise: Learning Image Restoration without Clean Data
Why it works?
- 疑问:
- 输入是一张噪声图,GT也是一张噪声图,怎么学到cln的img?
- 网络如何学习
一些理解
噪声是随机的,目标是constant不变的,就像估计room的温度,每一次估计值都是充满噪声的(不精确)但是我们需要的仅仅是测完(看完)所有测试温度 ${T_1, T_2 … T_n}$ 后取其均值作为我们的最终估量值。类比于img 去噪过程。本身而言,我们取得无噪声图像GT时就是一次噪声平均值,我们只是把它当作了无噪声的img。倘若网络学习的东西并不是我们所认为的 $nosie \rightarrow cln$ 的点到点mapping,而是keep 变化中需要保留的content呢?
具体来说,由于噪声是不稳定的,随机的,当网络将噪声图 $N_1$ 映射至 $N_2$ 时,要让总体的 $\mathcal{L} = \mathbb{E}{ L(N_1, N_2) } $ 最小,抛去无法降低的loss,随机的噪声,网络只能让img中不变的地方保持或者更加清晰才能使得loss下降。
原理以及公式推导
对于一次估计而言: ,我们想让每一次预测值 与观测到的采样值 尽可能相近。也就是让其损失期望最小。一般而言我们采用L2损失,这样对 求z的偏导,得到 $z = \mathbb{E_y}{y}$ 时最小。
对于 ,其中 $x$ 是理想无噪声图片GT, $y, z$ 都是同一场景不同噪声的采样的图片。去噪过程中我们的目标函数为:
而其中
- 其中
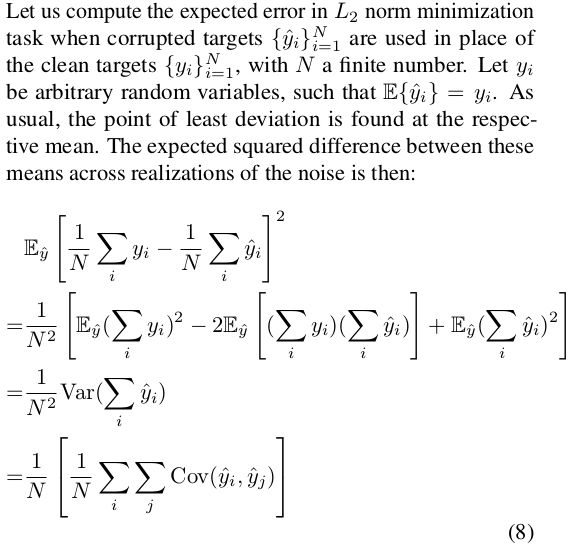
图片中的公式(8)的 是噪声图,所以可以得到
- 其中 中, 与 $(z-x)$ 不独立 无法进行计算,
进一步我们将其化为:
其中
所以:
在Noise2Noise中 $ \mathbb{E}(x) = \mathbb{E}(z)$ 所以 :
在Neiber2Neiber中 $\mathbb{E}(x) \neq \mathbb{E}(z)$ 所以
这样就可以获得论文中的(10)-(11):