Practical Deep Raw Image Denoising on Mobile Devices
Pipeline
在真是情况中,ISO在拍摄的时候会自动变化,不同的ISO引起的噪声的分布不同,本文Proposed to 提供一个ISO blind 的去噪网络,值得注意的是,网络本身是train在ISO-indpendent的数据上,网络不是blind,方法流程blind。
In real applications the camera will automatically adjust the ISO settings according to the scene illumination, thus one has to consider different noise levels when training the denoising neural network. A straightforward solution is to train a single network to cover a wide range of ISO settings, but it puts extra burden on the network itself as the noise variation in the training data becomes quite large.
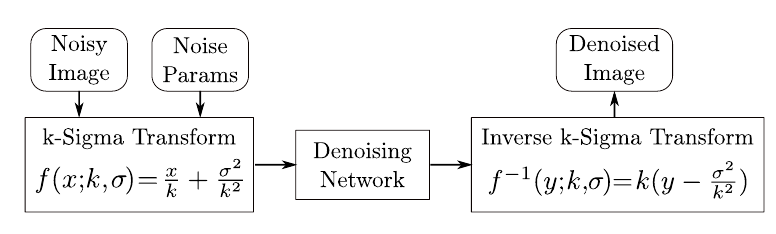
针对不同的ISO,使用K-Sigma 变化将raw 图像转为ISO-independent的数据输入到网络中。 $x = f(x^;k,\sigma)$ 其中 $x^$ 是sensor得到的raw图, $x$ 是转换后的数据。 在 $x$ 域中进行去噪,然后使用ISO-dependent的转换函数 $f^{-1}(x; k, \sigma)$ 可以将去噪后的图片转回原ISO对应的图像。
Why noise is ISO-dependent?
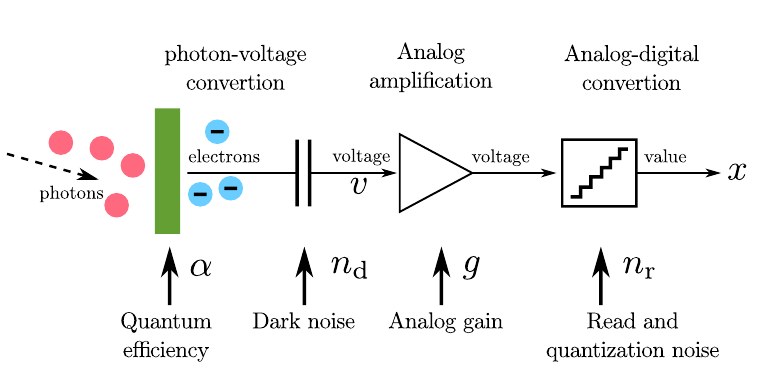
我们从sensor得到的图像 $x^$ 在理想状态下经过光量子收集( $u^$ )+模拟增益,得到实际数字信号的 $x$ .但是这个过程中往往存在Noise,我们实际得到的图像可以建模为:
其中, $n_d; n_r$ 是在各个阶段加入的噪声, $u$ 是光量子的接受量, $u \sim \mathcal{P}(u^*)$ , 进一步可以得到:
泊松分布的期望方差 $g\alpha = k $ 。可以得到
推导:
$f(x)$ 的分布只和 $f(x^)$ 有关,我们可以使用 $f(x)$ 去预测 $f(\hat{x}^)$ 然后使用 $f^{-1}(\cdot)$ 来得到最终结果。
Network
网络的设计是针对mobile 来设计的,使用了separable-conv来减少计算量: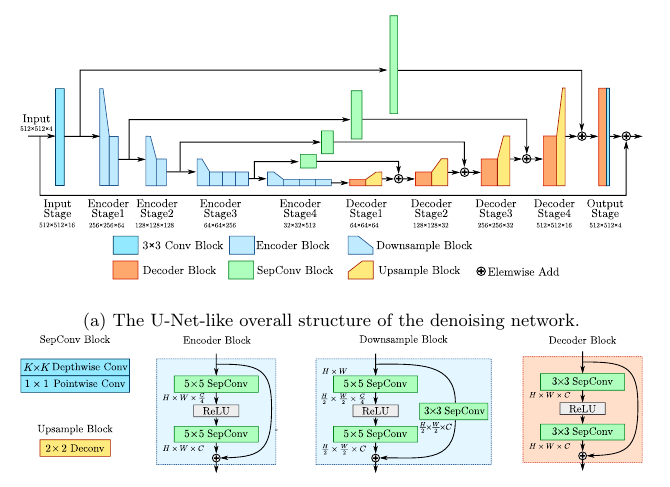
实验
对每一个ISO 都估计采样样本的方差和期望,使用
去拟合得到 $k; \sigma$ 的值。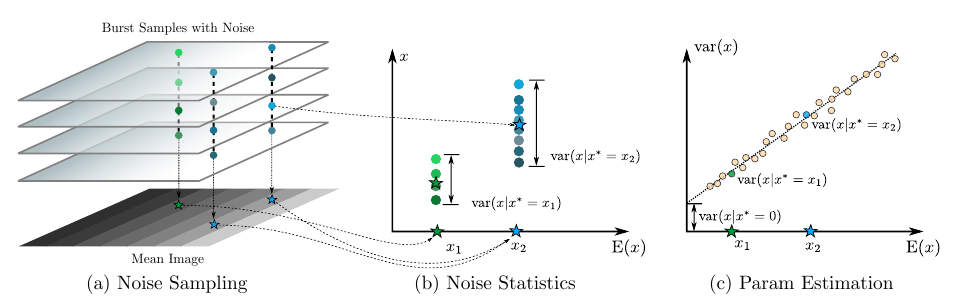
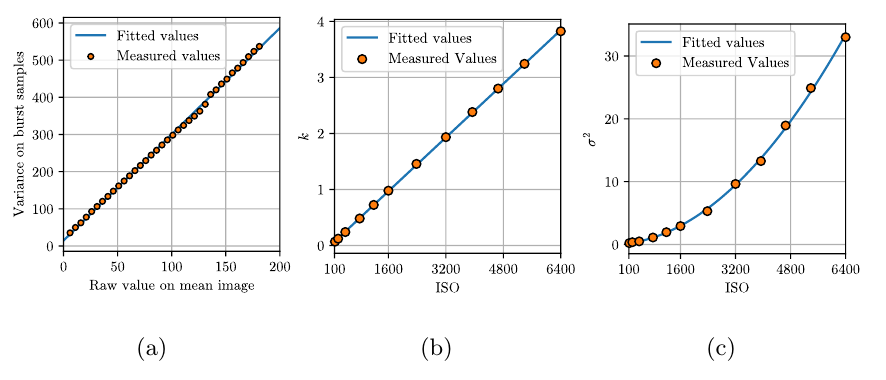
首先得到不同的ISO的采样结果,计算该手机的 $k;\sigma$ 然后使用 k-sigma变化 $ f(x) = \frac{x}{k} + \frac{\sigma^2}{k^2}$ 得到转换后的图片,在这些图像中进行训练。换句话说,对于每个手机而言 $k; \sigma$ 是一样的, $k; \sigma$ 是同一个手机通过在不同ISO下的数据拟合得到的。然后对于所有数据集中的数据,可以任意变化、增强之,进行 k-sigma变化得到ISO-independent数据。作者假设不同的手机 $k; \sigma$, 没有对不同sensor进行实验。